| Motores a pasos |
| |
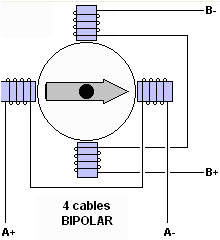
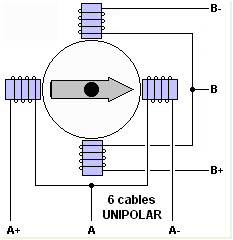
El motor a pasos es un dispositivo electromecánico que convierte una serie de impulsos eléctricos en desplazamientos angulares discretos, lo que significa que es capaz de avanzar una serie de grados (paso) dependiendo de sus entradas de control.
Estos pueden ser:
|
  |
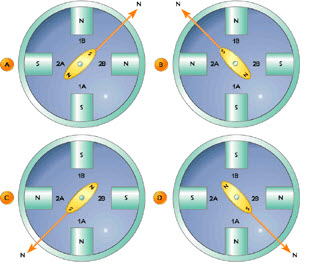
| Su funcionamiento es similar a los motores eléctricos comunes, que solo giran cuando se aplica el voltaje, pero a diferencia de estos cuentan con más de 2 estatores lo que divide una rotación completa (360°) en un gran número de pasos rotacionales. En el siguiente ejemplo tenemos 4 estatores a los que su polaridad varía en secuencia, obteniendo 4 pasos:
|
 |
Las ventajas de los motores a pasos son:
- El ángulo de rotación es proporcional a los pulsos de entrada.
- El motor tiene torque máximo cuando el mismo está enclavado (no girando pero con las bobinas energizadas).
- Exactitud en la posición y repetición de movimientos. (error de 3 a 5% del ángulo mínimo)
- Excelente respuesta ante arranque, parada y reversa.
- El motor responde a pulsos de entrada digitales, lo que permite un control de lazo abierto, haciendo un control más simple y barato.
- Es posible lograr una velocidad de rotación muy baja en forma sincrónica con carga acoplada directamente sobre el eje.
- Pueden tener un gran rango de velocidades de rotación, dado que la misma es proporcional a la frecuencia de los pulsos de entrada.
|
| |
| Para controlar el motor es necesario utilizar un puente H y enviarle una secuencia lógica. Estos dos circuitos se encuentran por lo general en el driver del controlador, al que solo se le introduce el pulso de paso y dirección.
|
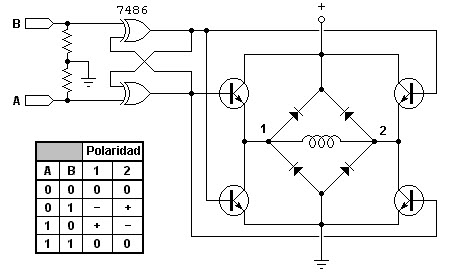 |
Dependiendo de la secuencia introducida, se pueden tener tres modos de trabajo:
Secuencia Normal. Esta es la secuencia más usada y la que generalmente recomienda el fabricante. Con esta secuencia el motor avanza un paso a la vez y debido a que siempre hay al menos dos bobinas activadas, se obtiene un alto torque de paso y retención. (Véase Tabla)
Secuencia Wave Drive: En esta secuencia se activa solo una bobina a la vez. En algunos motores esto brinda un funcionamiento más suave. La desventaja es que al estar solo una bobina activada, el torque de paso y retención es menor. (Véase Tabla)
Secuencia de medio paso. Es esta secuencia se activa las bobinas de tal forma que se puede brindar un movimiento igual a la mitad del paso real. Para ello se activan primero 2 bobinas y luego solo una y así sucesivamente. Como vemos en la tabla la secuencia completa consta de 8 movimientos en lugar de 4.
|
| |
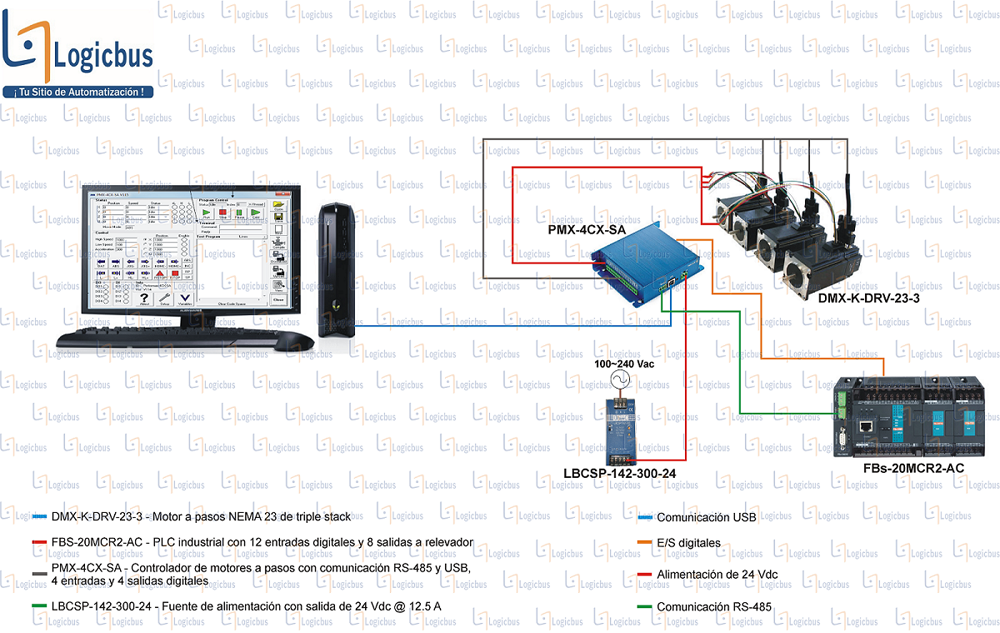
| Controlador de movimiento para motores a pasos |
| PMX-4CX-SA |
|
El PMX-4CX-SA es un controlador de movimiento para motores a pasos de 4 ejes con comunicación USB.
El controlador permite descargar programas para su funcionamiento autónomo sin depender de una computadora. Incluye drivers para Windows y Linux, así como ejemplos del código de comunicación, para poder adaptarse a su programación.
Características:
- Controlador de movimiento básico de 4 ejes
- Comunicación USB 2.0 y RS-485
- Frecuencia de salida de hasta 400000 pulsos
- Aceleración trapezoidal
- Salidas de colector abierto de Pulse/Dir/Enable por eje
- Entradas opto aisladas de +Limit, -Limit, y Home por eje
- 4 entradas digitales opto aisladas
- 4 salidas digitales opto aisladas
- Lenguaje similar a BASIC para programación en modo autónomo
- Soporta programación de multitareas
|
 |
| Haga clic en la imagen para expandirla |
| |
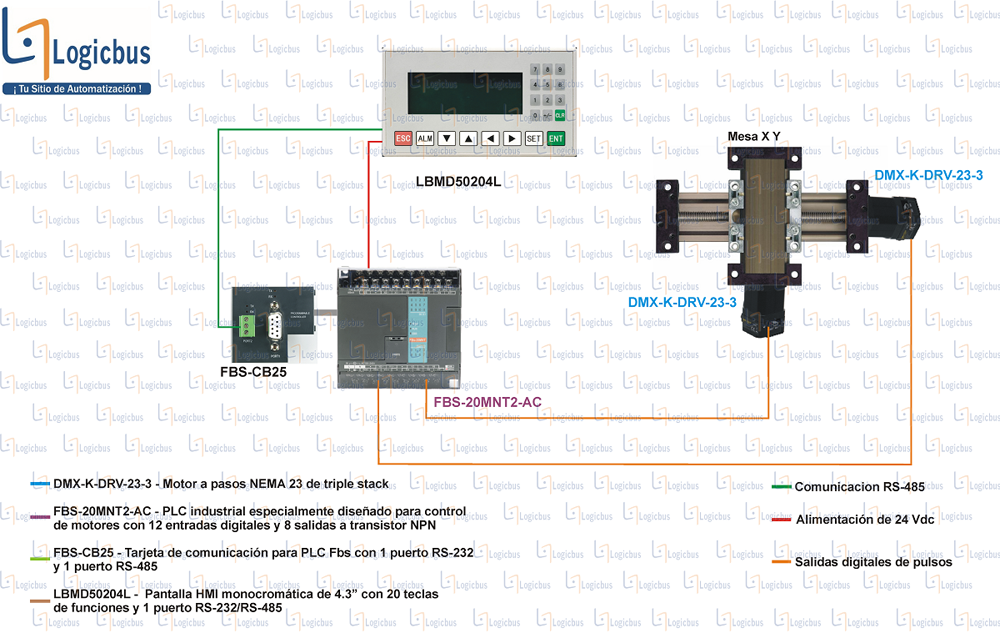
| Motor a pasos NEMA 23 triple stack con driver |
| DMX-K-DRV-23-3 |
|
Motor a pasos Nema 23 triple stack con driver de micropasos integrado. Puede ser controlado mediante entradas/salidas digitales, 4 perfiles de movimiento seleccionables y alimentación de 12~24 Vdc.
Características:
- Compatible con micropasos: completo, 1/2, 1/4, 1/16
- Configuración de corriente de 100mA ~ 2.5A
- Entradas diferenciales optoaisladas de Pulso/Dirección (CW/CCW)
- Salida de alarma de sobrecalentamiento
- Rango de pulsos soportado: 200k pulsos
|
 |
| Haga clic en la imagen para expandirla |
| |
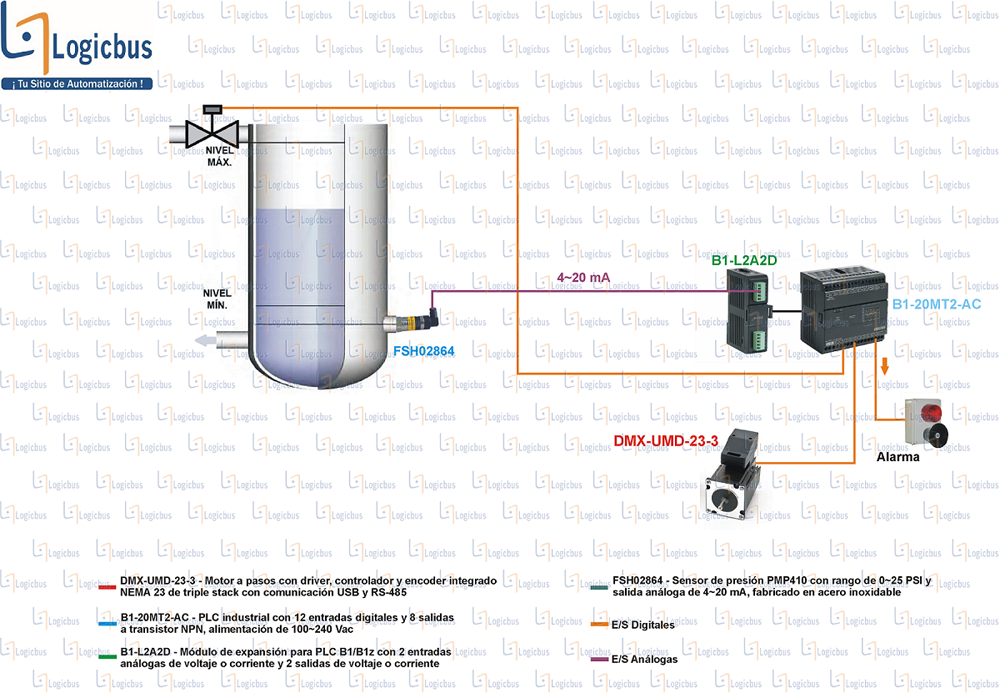
| Motor a pasos con driver, controlador y encoder integrado |
| DMX-UMD |
|
Este motor tiene integrado un controlador, encoder y driver, esto hace que solo lo tengas que conectar a tu computadora con un cable USB y realizar el control con los diferentes lenguajes de programación soportados como: LabVIEW, Visual Basic, Visual C++, o cualquier lenguaje que soporte acceso a DLL's.
Características:
- Puerto USB 2.0 (Requiere cable estándar USB A -> MiniB )
- Puerto RS-485
- 6 entradas y 2 salidas digitales aisladas
- Salida digital de alarma por sobrecalentamiento
- Software gratuito para programación y configuración
- Permite descargar un programa autónomo para ejecutar el control independientemente de una PC
- Alimentación de 12 a 48 Vdc (Requiere Fuente LBCSP-142-100-24)
|
 Haga clic en la imagen para expandirla Haga clic en la imagen para expandirla |
| |





















