El documento describe cómo agregar y configurar sensores MODBUS RTU para trabajar con controladores TCW260 o TCG140-4.
1. Conoce más de MODBUS RTU
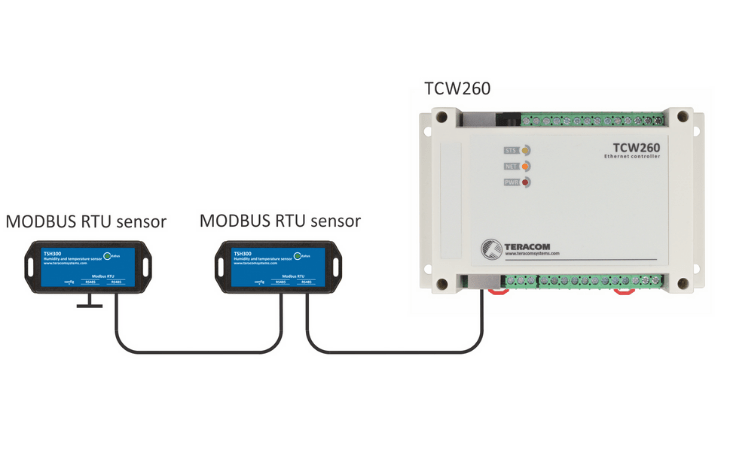
Modbus es un protocolo serial de comunicaciones publicado originalmente por Modicon (ahora Schneider Electric) en 1979. El protocolo MODBUS RTU utiliza una arquitectura maestro-esclavo sobre una interfaz RS-485. Cada sistema consta de un maestro MODBUS RTU (controlador, PLC, PC, etc.) y al menos un esclavo MODBUS RTU (sensor).
La comunicación entre el maestro y los esclavos se realiza con mensajes estándar. El mensaje MODBUS RTU consta de una dirección MB (dirección esclava), código de función, datos y CRC.
![]()
La dirección MB debe ser única para cada dispositivo esclavo del sistema. En otras palabras, no está permitido utilizar la misma dirección para dos o más dispositivos esclavos; esto provocará una falta de coincidencia en la comunicación.
De acuerdo con las reglas de MODBUS RTU, la dirección puede ser un número en el rango de 1 a 247. Cada fabricante de sensores MODBUS RTU tiene su propio sistema para cambiar la dirección.
Para todos los sensores Teracom, la dirección se cambia a través de la interfaz, utilizando la “herramienta de configuración del sensor” disponible en el controlador. Por defecto, la dirección es 1.
Además de la dirección MB, durante la comunicación, el maestro utiliza las llamadas direcciones de registro. Indican al sensor qué datos exactamente le interesan al maestro. Podemos comparar la dirección MB como el nombre de la calle (número) mientras que el registro se dirige como los números de las casas a lo largo de esa calle.
Por ejemplo, para el sensor de temperatura TST300, el valor de temperatura está disponible en el registro número 100. Entonces, si tenemos dos sensores TST300, uno en la dirección MB 1 y otro en la dirección MB 2, para leer sus temperaturas el maestro usará el registro número 100 para ambos. Preste atención a que las direcciones MB son diferentes (obligatorias), pero el número de registro utilizado para cada sensor puede ser el mismo.
Cada registro tiene su propia longitud y orden de datos. Estos parámetros deben ser especificados por el fabricante. Son esenciales para el maestro MODBUS RTU para la correcta interpretación de los datos.
2. Cómo jugar con las direcciones MB de TST300 y TSH300 usando el TCW140-4
Antes de agregar y configurar más de un sensor en la interfaz Modbus, debemos verificar / cambiar sus direcciones MB, para seguir la regla para diferentes direcciones.
Todos los sensores MODBUS RTU de Teracom nuevos tienen la dirección predeterminada 1. Si los sensores no son nuevos, la buena práctica es devolverlos a sus valores predeterminados de fábrica. Por lo tanto, puede esperar un conflicto si conecta ambos sensores (TST300 y TSH300) directamente a la interfaz.
Para verificar / cambiar las direcciones MB usaremos la “herramienta de configuración del sensor” disponible en el controlador. El enlace a la herramienta se encuentra en la parte inferior de Configuración-> página de sensores MODBUS RTU:

¡Atención! La “herramienta de configuración del sensor” debe usarse con un solo sensor en la interfaz.
La “Herramienta de configuración del sensor” consta de 3 párrafos: “Configuración de la comunicación”, “Configuración del registro de comunicación del sensor” y “Verificación del registro del sensor”:
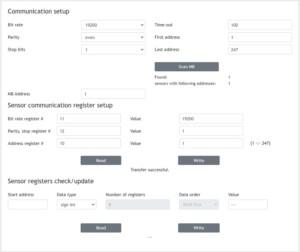
Para la verificación de la dirección MB, solo se utilizará el primer párrafo, mientras que para el cambio de dirección MB se utilizarán los dos primeros párrafos.
En la “Configuración de comunicación” se deben completar todos los parámetros necesarios para el sensor. El algoritmo de trabajo es el siguiente:

Primero, se eligen la velocidad de bits correcta, la paridad y el número de bits de parada. Esta información está disponible en el manual de usuario del sensor.
Después de esto, usaremos la herramienta de escaneo para encontrar la dirección de interfaz del sensor. Se recomienda utilizar Time-out = 100, First address = 1 y Last address = 247. Al presionar el botón “Escanear”, se inicia el proceso de escaneo. Como resultado del escaneo, la dirección del sensor se mostrará después de la cadena “sensores con las siguientes direcciones:”.
Si solo queremos comprobar la dirección del sensor, basta con lo anterior.
Si queremos hacer cambios en el sensor, la dirección encontrada debe escribirse en el campo “Dirección MB”.
Para tener la posibilidad de leer / escribir el registro de sensores, los 4 parámetros en el lado izquierdo del párrafo “Configuración de comunicación” deben ser correctos.
Recuerde, el proceso de escaneo es solo una herramienta que lo ayuda a encontrar la dirección del sensor. Si conoce la dirección del sensor (después del procedimiento predeterminado, por ejemplo), no es necesario que lo ejecute.
Después de la verificación exitosa de la dirección MB, podemos continuar con el cambio de dirección MB.
El algoritmo de trabajo es el siguiente:

Según el manual de usuario del sensor, el registro para la Dirección MB es 10. Este número debe escribirse en el campo “Registro de direcciones #”. La nueva dirección del sensor debe completarse en el campo “Valor”. Por ejemplo, queremos cambiar la dirección de 1 a 2, el campo “Valor” debe cambiarse a 2.
Presione el botón “Escribir”.
Para asegurarse de que la dirección haya cambiado, presione el botón “Escanear” en el párrafo “Configuración de comunicación”. Si todo está bien, el informe de escaneo será “sensores con las siguientes direcciones: 2”.
3. Cómo agregar y configurar TST300 y TSH300
Después de verificar las direcciones MB de los sensores y estamos seguros de que no se producirán conflictos debido a las mismas direcciones, podemos ir a añadir y configurar los sensores en el controlador.
Esto se puede hacer en la página Servicios-> Modbus para TCG140-4 o equivalente para otros controladores.

Para MODBUS RTU, se utilizan el segundo y tercer párrafo.
Primero, se eligen la velocidad de bits correcta, la paridad y el número de bits de parada.
La herramienta de escaneo se puede utilizar como una opción. Si previamente configuramos TST300 en la Dirección MB 1 y TSH300 en la Dirección MB2, sabemos que no es necesario utilizar las direcciones y la herramienta de escaneo.
Por el manual de usuario del TST300 sabemos que la temperatura está disponible en el registro con dirección 100, el formato de datos es “Float”, el orden es “MSW first” y el tiempo de respuesta es 50mS.
Entonces, combinando toda la información que conocemos, configuramos la primera fila de la siguiente manera:

Presione el botón “Guardar”.
Si todo se hace bien, en la columna “Valor bruto” aparecerá la temperatura real.

El mismo procedimiento se repite para TSH300. La única diferencia es que leeremos valores de dos registros.
Por el manual de usuario del TSH300 sabemos que la temperatura está disponible en el registro con dirección 100, la humedad está disponible en el registro con dirección 102, el formato de datos es “Float”, el orden es “MSW first”, y el tiempo de espera de respuesta es de 50 mS.
Entonces, combinando toda la información que conocemos, configuramos la primera fila de la siguiente manera:
![]()
Presione el botón “Guardar”.
Si todo está bien, la columna “Valor bruto” mostrará la temperatura y la humedad reales.
![]()
Con los sensores ya instalados, la página de monitoreo se verá de la siguiente manera:

Los procedimientos anteriores también se pueden utilizar para equipos y sensores de terceros.
También puedes leer nuestro artículo “TDI340 – Contador de pulsos S0 con interfaz MODBUS RTU” donde podrás encontrar más información sobre esta gama de productos.
Conoce más de esta gama de productos en nuestra página: https://www.logicbus.com.mx/teracom.php
Contáctanos




ventas@logicbus.com | soporte@logicbus.com | 55-5431-67-18 | Iniciar conversación