
El sensor fotoeléctrico actual es uno de los dispositivos de detección sin contacto más versátiles conocidos por el hombre. La confiabilidad de los “ojos” o “sensores” fotoeléctricos dio un gran paso adelante a principios de la década de 1970, cuando el diodo emisor de luz (LED) reemplazó a la frágil fuente de luz incandescente.
Esta fuente de luz de estado sólido también permite al diseñador eliminar la mayoría de los problemas causados anteriormente por la luz ambiental de la habitación. Las modernas fotocélulas de impulsos modulados reaccionan únicamente a la luz emitida por su propia fuente de luz.
Esta capacidad permite que el sensor sea muy sensible y responda a pequeños cambios de luz que ocurren en la trayectoria del haz de luz entre la lente fuente de luz y la lente receptora.
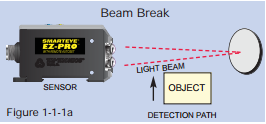
Para que un objeto sea detectado, debe afectar la intensidad del haz de luz que llega al detector de luz del sensor de una de dos maneras:
- El objeto debe interrumpir o disminuir la trayectoria del haz de luz existente entre la lente de la fuente de luz y la lente del receptor: modo Beam Break (consulte la Figura 1-1-1a).
- El objeto en sí debe difundir o reflejar el haz de luz hacia la lente receptora: modo
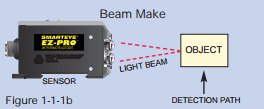
Beam Make (consulte la Figura 1-1-1b)
Una forma segura de simplificar la selección de un sensor fotoeléctrico que se ajuste a su aplicación es recordar que sólo tiene dos opciones: Hacer haz o Romper haz.
Niveles de luz contrastantes
La tarea de detección de cualquier sensor fotoeléctrico de conmutación digital es responder y resolver la diferencia entre los niveles de luz contrastantes y cambiar su salida en consecuencia.
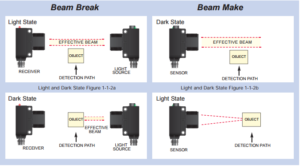
Cuando se opera en el modo Beam Break , la intensidad del haz de luz que llega a la lente receptora está en su estado más brillante o más claro antes de que un objeto se introduzca en la trayectoria del haz de luz. Introducir un objeto en la trayectoria del haz de luz bloqueará o disminuirá la intensidad del haz de luz recibido, lo que dará como resultado la condición de estado más oscuro (consulte la Figura 1-1-2a).
En el modo Beam Make , la condición del estado más oscuro es antes de que un objeto se coloque en la trayectoria del haz de luz. La condición del estado más luminoso es cuando se introduce un objeto en la trayectoria del haz de luz para hacer rebotar o reflejar el haz de luz hacia la lente receptora (consulte la Figura 1-1-2b).
La cantidad de diferencia o desviación de la intensidad del haz de luz en su estado más claro versus la intensidad del haz de luz recibido en el estado más oscuro se llama “contraste”.
Estos niveles de luz contrastantes definen el grado de dificultad de la tarea de detección. En el sector inmobiliario, es bien sabido que las tres consideraciones más importantes son ubicación, ubicación y ubicación. En la detección fotoeléctrica, las tres consideraciones más importantes son contraste, contraste y contraste.
Detección de rotura de haz
Modo opuesto
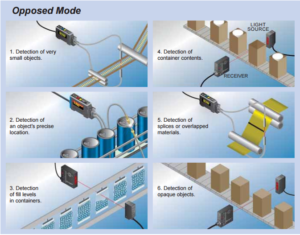
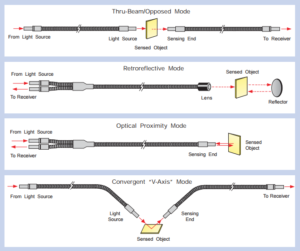
En el modo de detección opuesto, se utilizan dos dispositivos separados que utilizan guías de luz con lentes o de fibra óptica para generar o deshacer un haz.
- Una unidad es la fuente de luz.
- El otro es el receptor.
En este modo, la fuente de luz transmite un haz de luz a través del camino de detección hasta el receptor. La detección ocurre cuando un objeto interrumpe o disminuye suficientemente la intensidad del haz de luz recibido (ver Figura 1-2-1).
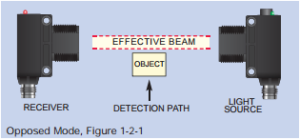
Desafortunadamente, la detección de rotura de haz a menudo se pasa por alto como resultado del costo inicial de comprar e instalar dos dispositivos separados y la, a veces, tediosa tarea de alineación. Sin embargo, el modo opuesto de detección tiene claras ventajas al detectar productos opacos. Proporciona el método de detección más confiable en condiciones muy adversas, como ambientes polvorientos, sucios y cargados de humedad. Recuerde… cuando esté opaco, utilice Beam Break.
Modo retrorreflectante
El sensor retrorreflectante contiene tanto la fuente de luz como el dispositivo receptor en una sola carcasa. Un exclusivo sistema de doble lente o guía de luz de fibra óptica bifurcada establece la trayectoria del haz de luz transmitida y la trayectoria del haz de luz de retorno en el mismo eje. Cuando un sensor o fibra retrorreflectante apunta o apunta a un reflector, el haz de luz se refleja de regreso a la lente o fibra receptora (consulte la Figura 1-3-1). La alineación del sensor con un reflector prismático puede estar sesgada de 10 a 15 grados y, aun así, un haz de luz potente regresará a la lente receptora exactamente en el mismo eje que el haz de luz transmitido original.
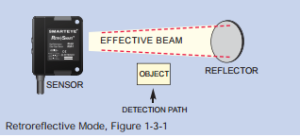
Para detectar la presencia o ausencia de objetos, la trayectoria del haz de luz se dirige a través de la trayectoria de detección, de modo que los objetos opacos que pasan interrumpan el haz de luz. Cuando el haz de luz se interrumpe o cuando la intensidad del haz de luz recibido se reduce por debajo de un nivel umbral, el sensor responde conmutando su salida.
Cuando se detectan piezas pequeñas, la opción recomendada es opuesta a la detección de modo utilizando guías de luz de fibra óptica. El sensor retrorreflectante es generalmente de bajo costo y fácil de instalar. Sin embargo, se debe tener cuidado para garantizar que los objetos brillantes que pasan cerca del sensor no reflejen un haz de luz en la superficie del objeto lo suficientemente fuerte como para cambiar accidentalmente la salida del sensor. Esta característica indeseable del sensor retrorreflectante se denomina proxying. Para evitar la representación, el haz de luz del sensor se puede alinear en un ángulo de incidencia que refleje el haz de luz lejos de la lente receptora. Otra forma de reducir el proxy es polarizar el haz de luz. La luz polarizada ayuda a garantizar que sólo el haz de luz reflejado por el reflector prismático llegue al receptor del sensor. Si bien reduce la respuesta a la luz reflejada en la superficie del objeto detectado, la polarización reduce el rango de detección.
Detección de objetos transparentes/brillantes
Hasta ahora, el sensor retrorreflectante era la opción más eficaz para detectar objetos opacos. Sin embargo, recientemente las cosas han cambiado. Gracias a los avances tecnológicos, el nuevo sensor retrorreflectante Retro Smart ™ puede detectar, absolutamente y sin falta, CUALQUIER objeto transparente, translúcido o brillante. El sensor Retro Smart ™ proporciona una salida única y sin vibraciones para cada botella de PET transparente o lata de metal brillante que pasa a través del estrecho haz de luz roja del sensor.
Sensores de GAP
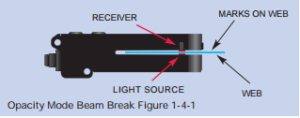
Los sensores de espacios son una excelente opción para detectar un cambio u objeto distintivo en una red continua o un rollo de materiales. Al utilizar técnicas de detección del modo de opacidad que utilizan una fuente de luz capaz de penetrar a través de la red de materiales, los sensores de espacios pueden registrar ligeros cambios de nivel de luz contrastantes y producir una señal de salida para una operación específica de la máquina.

Una ventaja significativa de la detección del modo de opacidad con los sensores de espacio TRI-TRONICS ® es que los usuarios finales no necesitan preocuparse por el movimiento de la banda o la luz ambiental, incluidos los flashes estroboscópicos. Dependiendo de lo que intente detectar, los sensores del modo de opacidad pueden brindarle la señal de salida deseada para realizar las funciones de la máquina. Las aplicaciones típicas incluyen la detección de etiquetas en un rollo, la detección de marcas de registro en material de embalaje impreso y la detección de empalmes en bandas continuas de material. Dado que la detección del modo de opacidad distingue el cambio del nivel de luz a medida que la luz pasa a través de una red de material, la red debe ser translúcida o transparente. La mayoría de las bandas de material de embalaje, como películas, películas metalizadas y papel, dejan pasar la luz. Los materiales opacos como el papel de aluminio no dejan pasar la luz y, por lo tanto, no se pueden utilizar en la detección del modo de opacidad.
MARK• EYE®
El sensor MARK•EYE ® está diseñado para ver marcas de registro impresas en la mayoría de los materiales de embalaje en una red continua. Al detectar la diferencia de nivel de luz contrastante entre el material de fondo y la marca de registro en la web, las señales de salida del sensor para realizar una función de la máquina.
ETIQUETA•EYE ®
El sensor LABEL•EYE ® está diseñado específicamente para detectar una variedad de etiquetas adhesivas en un rollo continuo. Funciona detectando el cambio de nivel de luz contrastante que penetra a través del material de soporte de una red y una etiqueta autoadhesiva. La función de LABEL•EYE ® es mirar a través del papel de respaldo para detectar el “espacio” entre las etiquetas e indicarle a la máquina etiquetadora que detenga el mecanismo dispensador antes de que la etiqueta se desprenda completamente del material de respaldo. Con la siguiente etiqueta “arriba” sobresaliendo del extremo de la placa peladora, ahora está perfectamente posicionada para ser aplicada al siguiente producto a medida que pasa por un transportador.
Modo de proximidad óptica
Los sensores de proximidad ópticos contienen tanto la fuente de luz como el receptor en una carcasa común. La lente de la fuente de luz da forma al haz de luz en una columna de luz divergente que, con la distancia, aumenta en ancho y disminuye en intensidad. Se utiliza una lente receptora de gran angular para recoger el haz de luz reflejado en la superficie del objeto a detectar (consulte la Figura 1-5-1).

También se puede utilizar una guía de luz de fibra óptica bifurcada cuando la luz pasa a través de la guía de luz de fibra óptica. La luz se refleja en el objeto y regresa a través de la fibra al receptor del sensor.
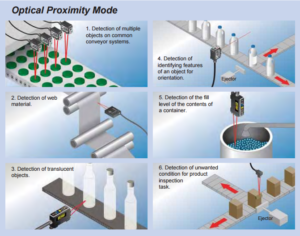
A menudo es difícil, sino imposible, acceder a ambos lados de la ruta de detección de objetos que pasan por el sitio de detección. Cuando ocurre esta circunstancia, el modo de detección Beam Make es la única opción. Por ejemplo, cuando se intenta detectar cada elemento en una fila de objetos que descansan sobre una cinta transportadora común, se recomienda el sensor de proximidad. En esta situación, el sensor de proximidad debe resolver la diferencia entre los niveles de luz contrastantes que se reflejan en el objeto y la luz que se refleja en la cinta transportadora.
La supresión de la luz que se refleja en los objetos brillantes del fondo se puede mejorar colocando correctamente el sensor. Si el ángulo de incidencia del haz de luz reflejado se ajusta de modo que la trayectoria del haz de luz no regrese a la lente receptora, el sensor de proximidad solo responderá a la luz que se difunde o se refleja en el propio objeto.
Desafortunadamente, hay muchas situaciones en las que la intensidad de la luz reflejada por el objeto no es muy diferente de la intensidad de la luz reflejada por los objetos del fondo. En aplicaciones en las que el diferencial entre estos niveles de luz contrastantes es mínimo, se recomienda un sensor de alto rendimiento equipado con amplificadores de alta ganancia y un indicador de contraste. Como resultado del haz de luz divergente, a veces es necesario que los objetos pequeños estén tan cerca como 1/8 de pulgada de la lente receptora o de la punta de la fibra a detectar. En este modo se pueden detectar objetos más grandes a una distancia de hasta 6 pies o más.
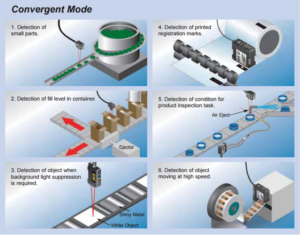
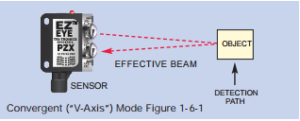
Modo convergente (“eje V”)
El modo convergente de Beam tiene sentido y es muy similar al modo de proximidad. El sensor de haz convergente, al igual que el sensor de proximidad, responde a la trayectoria del haz de luz que se refleja en la superficie del objeto. Sin embargo, el sistema de lentes de un sensor convergente (también conocido como “Eje V”) hace converger el haz de luz en un pequeño punto de luz a una distancia de unas pocas pulgadas, precisamente en el punto focal de la lente receptora. El uso de esta técnica proporciona un método eficaz para mejorar la supresión del fondo, mientras se dirige, mediante reflexión, un haz de luz muy potente en un camino directo hacia la lente receptora. Además de mejorar la supresión de fondo, la detección convergente es muy útil para la detección de piezas pequeñas y para la detección de datos de identificación impresos.
Las guías de luz de fibra óptica también se pueden utilizar en modo convergente para la detección del “eje V”. Simplemente dirija dos fibras al objetivo en una configuración en “V” y se pueden detectar partes pequeñas o los contrastes de un objeto.
Percepción del color para detectar marcas de registro

Detección de marcas de registro
La fuente de luz LED blanca de nuestros sensores es la mejor opción para detectar la más amplia variedad de marcas de registro de colores en el material de embalaje actual. La luz blanca mejora el rendimiento al detectar marcas de registro de colores oscuros en redes de materiales de colores oscuros. Además, el sensor SMARTEYE ® COLORMARK II está equipado con fuentes de luz LED rojas, azules, blancas y verdes. Estos colores son útiles en aplicaciones cuando la fuente de luz blanca preferida no funciona de manera óptima; es decir, se recomienda una fuente de luz LED.
blanca o azul para detectar marcas de color amarillo pálido sobre un fondo blanco.
Imagínese viendo una marca roja impresa en papel blanco. La marca roja parece oscura en contraste con el papel blanco. Ahora, imagina colocar un filtro rojo transparente frente a tu ojo mientras intentas ver esa misma marca roja. La marca roja ahora se vuelve difícil, si no imposible, de ver. Si el sensor está equipado con un LED rojo, el sensor tendría el mismo problema. Ahora imagínate viendo esa misma marca roja a través de un filtro verde. El fondo blanco ahora aparece de color verde brillante, pero la marca roja aparece negra o muy oscura. ¡Ese es el contraste que buscamos! Equipar el sensor con un LED verde le proporciona al sensor la misma ventaja que el filtro verde le dio a su ojo. Ahora, la marca roja proporciona una respuesta más que adecuada al contraste de luz que se refleja en el fondo blanco.
Detección del modo de opacidad
MARK •EYE ® ofrece una excelente solución para la detección del modo de opacidad. Es un sensor de ranura optimizado para ver marcas de registro impresas en películas transparentes, translúcidas y metalizadas en una red continua de materiales. Dado que MARK•EYE ® opera en el modo de detección de opacidad, el color de la marca de registro simplemente no importa.
Modo de proximidad óptica
El MARK•EYE ® PRO ha sido diseñado para detectar la más amplia variedad de marcas de color en la más amplia variedad de colores de banda. Está optimizado para la detección a alta velocidad de marcas de registro en materiales opacos.
Cuando se desea otro color de LED, COLORMARK II es una excelente opción. Con los LED rojo, azul, verde y blanco, ver la marca de registro nunca ha sido tan fácil.
Otras tareas de percepción del color
El sensor SMARTEYE ® COLORWISE ™ es extremadamente útil en tareas de detección de objetos cuando la única característica distinguible es una diferencia de color. Un ejemplo de una aplicación en la que la percepción del color es extremadamente útil en la detección de objetos es identificar el contenido de un recipiente por el mero color de su tapa. Tenga en cuenta que no se pueden resolver todos los tonos similares del mismo color; sin embargo, muchos pueden hacerlo.
SMARTEYE ® COLORWISE ™ está diseñado para la percepción y el reconocimiento del color . Todos los modelos están equipados con amplificadores de alta ganancia que brindan una excelente resolución en aplicaciones que requieren capacidad de color a color o de tono a tono. Los monitores de canales individuales (X4) brindan información visual sobre la coincidencia de colores y la intensidad de la señal, lo que aumenta la confianza del usuario en el éxito de la solución de la aplicación.
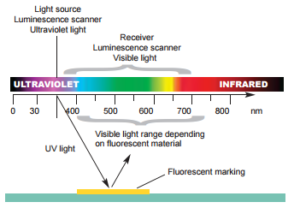
Detección de luminiscencia
Sensor de luminiscencia
El sensor SMARTEYE ® STEALTH-UV es un sensor de propósito especial diseñado para detectar la presencia de materiales fluorescentes invisibles contenidos en tizas, tintas, pinturas, grasas, pegamentos y blanqueadores ópticos especiales que se encuentran en etiquetas, papel, cintas, cordeles, etc. El sensor contiene una fuente de luz ultravioleta (UV) de estado sólido que se utiliza para excitar los materiales luminiscentes para que presenten fluorescencia en el rango visible. El detector del sensor reacciona entonces a la luz fluorescente visible. Cuando el nivel de luz fluorescente recibida, como se muestra en el indicador de contraste, alcanza un nivel de “4” o superior, los transistores de salida NPN y PNP cambiarán al estado opuesto.
Aplicaciones típicas de sensores de luminiscencia:
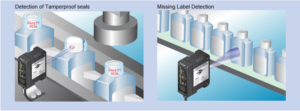
- Detección de precintos a prueba de manipulaciones
- Detección clara de etiquetas
- Detección de marcas de registro invisibles.
- Orientación del producto
- Verificación de la presencia de adhesivos.
- Verificación de lengüetas en los paquetes.
- Detección de cinta o empalme de web
- Verificación de pegamento sobre papel, plástico o materiales transparentes.
- Detección de rotura de hilo
- Detección de defectos mediante tiza o marcas invisibles en madera/productos de madera
- Detección de la presencia de un componente crítico en un conjunto complejo
Rango
La especificación del rango de detección proporcionada por los fabricantes de sensores suele ser el rango de detección absoluto máximo en circunstancias ideales.
En el modo opuesto de detección, el alcance máximo se define como la distancia máxima absoluta permitida entre la fuente de luz y el receptor.
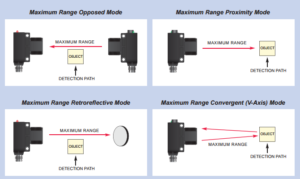
En el modo de detección retrorreflectante, es la distancia máxima absoluta entre el sensor y el reflector prismático.
En el modo de detección de proximidad, el alcance máximo es la distancia máxima absoluta entre el sensor y el objeto detectado.
Sin embargo, estas especificaciones del rango máximo de detección son solo como referencia. Esto se debe a que estas especificaciones de gama se toman en condiciones ideales, con lentes transparentes y en entornos muy limpios. Estas condiciones no se encuentran en la gran mayoría de aplicaciones industriales.
Muchos fabricantes proporcionan gráficos de “ganancia excesiva” que trazan el rango versus la intensidad de la señal obtenida por encima del nivel necesario para activar la salida del sensor. Estos gráficos se trazan con los ajustes de ganancia al máximo. En el modo Beam Break, el objetivo/objeto es más grande que el haz de luz efectivo y siempre es opaco.
Cuando se opera en el modo retrorreflectante, no hay manera de obtener el efecto de la luz reflejada en el objeto detectado.
En el modo Beam Make, el objeto es más grande que el haz de luz efectivo, es perfectamente plano y tiene una superficie blanca reflectante del 90%. Además, en el modo Beam Make, no hay forma de obtener el efecto de la luz reflejada en los objetos del fondo a partir de gráficos de ganancia excesiva.
En resumen, los gráficos de exceso de ganancia ignoran totalmente la intensidad de la señal generada por la condición de estado oscuro.
El indicador de contraste exclusivo de TRI-TRONICS ® proporciona indicaciones de intensidad de señal real que proporcionan una alineación perfecta al determinar la respuesta real a la intensidad de la luz recibida. Los sensores TRI-TRONICS ® equipados con indicadores de contraste proporcionan una indicación instantánea en tiempo real de la intensidad de la luz recibida en cualquier rango.
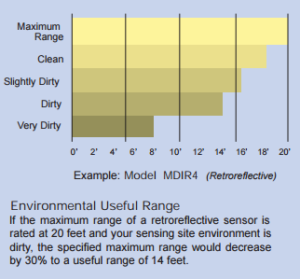
Los gráficos de desviación de la señal de contraste están disponibles en todos los sensores equipados con el indicador de contraste. Estos cuadros son extremadamente útiles para determinar si el sensor que ha seleccionado realizará adecuadamente su tarea de detección particular en el rango deseado. Simplemente haga referencia a la cantidad de desviación de contraste necesaria para realizar la tarea de detección en su entorno y compárela con la tabla de rendimiento del sensor que ha seleccionado para determinar si el rango de detección es adecuado.
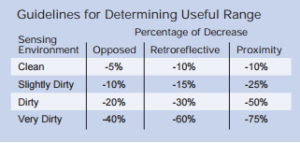
Para los sensores TRI-TRONICS ® no equipados con indicadores de contraste, se encuentran disponibles tablas de pautas de rango que indican los rangos de detección máximos recomendados. Para estimar un rango útil en su entorno, simplemente disminuya el rango máximo especificado en el porcentaje indicado en la siguiente tabla.
Consideraciones ambientales
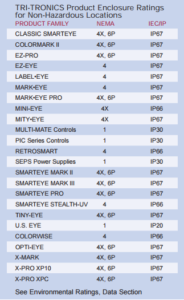
Al seleccionar el sensor TRI-TRONICS ® apropiado para su aplicación, siempre se deben considerar las condiciones ambientales del sitio de detección. Todos los productos TRI-TRONICS ® están diseñados con gabinetes o carcasas que brindan diversos grados de protección contra condiciones ambientales especiales. La tabla adjunta enumera las normas NEMA e IEC/IP que se aplican a los sensores y gabinetes de control TRI-TRONICS ®
Consulte a la fábrica para conocer el cumplimiento de RoHS.
Indicador de contraste Rendimiento garantizado
El indicador de contraste garantiza el rendimiento
Al observar las lecturas del indicador de contraste durante la instalación, se puede determinar la posición que genera la mayor cantidad de desviación de contraste. Maximizar la desviación del contraste en cualquier aplicación de detección da como resultado la garantía de máximo rendimiento y confiabilidad.
El indicador de contraste verifica el rendimiento
El rendimiento de cualquier SMARTEYE ® se puede diagnosticar en el sitio de detección observando la desviación del contraste como se muestra en el indicador de contraste. Para determinar la desviación, simplemente reste la lectura más baja (estado oscuro) de la lectura más alta (estado claro) y compare el número resultante con el sistema de clasificación de contraste que aparece a continuación.

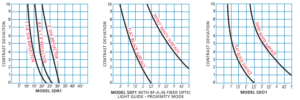
Gráficos de rendimiento de contraste para verificar el rango de detección
Estos cuadros son extremadamente útiles para determinar si el SMARTEYE ® que seleccionó realizará adecuadamente la tarea de detección en el rango deseado. Simplemente haga referencia a la cantidad de desviación de contraste necesaria para realizar la tarea de detección en su entorno y compárela con la tabla de rendimiento del SMARTEYE ® que ha seleccionado para determinar si el rango de detección es adecuado. A continuación se muestran tablas de rendimiento típicas de (3) sensores modelo SD SMARTEYE ® .
Directrices sobre fuentes de luz
FUENTE DE LUZ INFRARROJA INVISIBLE (880 nm)
- La mejor opción en la mayoría de las tareas de detección de objetos opacos
- Proporciona el rango de detección más largo posible en los modos de detección Beam Make o Beam Break
- La mejor opción en ambientes hostiles; útil en la contaminación penetrante de lentes
- Preferido para uso con guías de luz de fibra óptica de vidrio pequeñas. Nota: No utilice luz IR con guías de luz de fibra óptica de plástico.
- Preferido cuando se detectan objetos de colores oscuros en el modo de proximidad (Beam Make), es decir, negro, azul, verde, etc.
- Útil para penetrar contenedores para verificar el contenido; También es útil para detectar empalmes superpuestos en materiales densos.
- Percepción del color; tiende a favorecer los objetos de color azul
FUENTE DE LUZ AZUL (480 nm)
- Útil para detectar objetos translúcidos, transparentes, de plástico o de vidrio en el modo retrorreflectante cuando se utiliza el bloque óptico R4
- Se utiliza como filtro azul para mejorar la percepción del color, es decir, para distinguir objetos de color amarillo versus blanco o marcas de registro impresas.
FUENTE DE LUZ ROJA (660 nm)
- La mejor opción para usar con guías de luz de fibra óptica de plástico
- Útil al detectar objetos translúcidos en el modo de proximidad (Beam Make)
- Útil al detectar objetos transparentes en modo retrorreflectante de fibra óptica (Beam Break)
- Se puede polarizar para detección retrorreflectante (rotura de haz) para reducir la interferencia en objetos brillantes.
- Las guías de luz de fibra óptica opuestas pueden polarizarse para detectar algunos contenedores de plástico translúcidos; consulte a la fábrica para más detalles
- Se utiliza como filtro rojo para obtener ventajas en la percepción del color.
FUENTE DE LUZ BLANCA
(Espectro de color de banda ancha)
- La mejor opción para detectar todas las marcas de registro impresas en el material de embalaje
- Recomendado para detectar objetos de colores oscuros en el modo de proximidad (Beam Make)
- La mejor opción para clasificar objetos de colores.
Selección de bloque óptico
Los bloques ópticos intercambiables proporcionan una aplicación universal para sensores en cualquier aplicación de detección. Seleccione primero el sensor, luego elija el bloque óptico que coincida con el tamaño del punto y el objetivo.
| Serie clásica | Serie profesional y miniatura | |
| Detección de modo de proximidad | ||
| La óptica de haz amplio es útil para la detección de corto alcance de objetos brillantes transparentes, translúcidos o de forma irregular. | O2 | O4 |
| La óptica de haz estrecho es útil en la detección de largo alcance de objetos de tamaño mediano a grande. | O1, O1G | O5 |
| Adapta sensores a guías de luz de fibra óptica de vidrio. | F1 | F4 |
| Adapta sensores a guías de luz de fibra óptica de plástico. | – | F5 |
| Detección de modo retrorreflectante | ||
| La óptica de haz muy estrecho está diseñada para detectar reflectores o materiales reflectantes a larga distancia. Diseñado para detección de rotura de haz | R1 | R4 |
| Polarizado para reducir la respuesta al resplandor del “punto caliente” de la superficie brillante del objeto detectado. Úselo con una fuente de luz roja o azul. | – | R5 |
| Adapta sensores a guías de luz de fibra óptica de vidrio. | F1 | F4 |
| Adapta sensores a guías de luz de fibra óptica de plástico. | – | F5 |
| Detección de modo convergente | ||
| Óptica de haz estrecho que se enfoca en un rango de detección de 1″. Útil para detectar piezas pequeñas o marcas de registro, y también útil para detección de proximidad (rango de 1″ a 5″) para minimizar la respuesta a la luz reflejada de los objetos del fondo. | V1, V1G | V4, V4A |
| Óptica de haz estrecho que se enfoca en un rango de detección de 1,5″. Útil para detectar piezas pequeñas y también útil para detección de proximidad (rango de 1,5″ a 8″) para minimizar la respuesta a la luz reflejada de los objetos del fondo. | – | V6 |
| Óptica de haz estrecho que se enfoca en un rango de detección de 0,5″. Útil para detectar piezas pequeñas o marcas de registro. También es útil para detección de proximidad (rango de 0,25″ a 5″) para minimizar la respuesta a la luz reflejada de los objetos del fondo. | – | V8 |
Guías de luz de fibra óptica
Cuando apuntas con una linterna a un extremo de una guía de luz de fibra óptica de vidrio o plástico flexible, verás luz brillando en el otro extremo. La capacidad de guiar la luz desde el sensor hasta el objetivo proporciona muchas ventajas en la detección fotoeléctrica.
Las guías de luz de fibra óptica son lo suficientemente flexibles y pequeñas como para caber en áreas de detección difíciles. Esto permite ubicar el sensor en una ubicación más conveniente, fuera de peligro. Las fibras son resistentes a altas temperaturas, vibraciones, condensación y corrosión.
Una de las principales ventajas de las guías de luz de fibra óptica de vidrio es que se pueden dimensionar y moldear para proporcionar una ventaja óptica. Cuando se utilizan guías de luz de fibra óptica, se convierten en la óptica del sistema de detección.
En el sitio de detección, el tamaño y la forma del haz de fibra óptica que transporta la luz controlan el tamaño y la forma del haz de luz transmitido. El tamaño y la forma de la punta de fibra óptica controlan el área de visualización efectiva del sistema de detección. Hay lentes disponibles para obtener una ventaja óptica en las tareas de detección.
Nuestras guías de luz de fibra óptica de vidrio en miniatura combinan la resolución superior de color de las fibras de vidrio con el tamaño y la flexibilidad de las fibras de plástico. El radio de curvatura más estrecho le permite llegar a más áreas con facilidad.
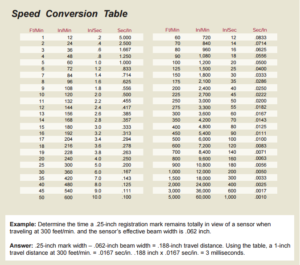
Tiempo de respuesta/velocidad de funcionamiento
Otro factor muy importante en la selección de un sensor fotoeléctrico es la capacidad del sensor para resolver eventos de entrada que ocurren a velocidades rápidas. Desafortunadamente, las especificaciones de tiempo de respuesta proporcionadas por algunos fabricantes de sensores fotoeléctricos son a veces vagas o, en el mejor de los casos, difíciles de interpretar. Cabe señalar que existe una diferencia entre el tiempo de respuesta y la velocidad de operación.
El tiempo de respuesta es el tiempo que tarda la salida del sensor en cambiar cuando se produce un cambio del estado más claro al más oscuro (o viceversa). Esto puede ser importante al intentar localizar la posición exacta de un objeto que se mueve a alta velocidad. La velocidad de funcionamiento es la tasa de conmutación de salida máxima que el sensor puede alcanzar. Esta clasificación suele expresarse mediante la tasa máxima de eventos de entrada que pueden resolverse en condiciones establecidas.
Estas condiciones generalmente implican eventos de entrada que están igualmente espaciados, es decir, el período de tiempo que el sensor estará en la condición de Estado Oscuro es igual al período de tiempo en la condición de Estado Luminoso. Esto se conoce como ciclo de trabajo 50-50. Si el ciclo de trabajo del evento de entrada es distinto de 50-50, la atención debe centrarse en la duración mínima de tiempo que el evento de entrada permanecerá en la condición de estado claro o de estado oscuro.
La duración más corta de tiempo transcurrido en cualquiera de los estados debe compararse con los tiempos mínimos de respuesta en estado claro/estado oscuro según lo estipulado en las especificaciones del sensor.
Una advertencia: tenga cuidado, no puede esperar que el sensor alcance el tiempo de respuesta mínimo especificado o las velocidades de funcionamiento máximas en todas las condiciones de detección sin realizar algunos ajustes en la configuración de ganancia o compensación.
Contáctanos






ventas@logicbus.com | soporte@logicbus.com | 55-5431-67-18 | Iniciar conversación