Comprar ahora

Buscar productos
Comprar ahora
Buscar productos

Todo lazo de control requiere de una retroalimentación, y el control de movimiento no es la excepción. Para medir la posición del eje del motor, requerimos de los encoders.
Un encoder convierte el movimiento en una señal eléctrica, la cual puede ser leída por equipos de adquisición de datos o directamente por un PLC.

Los Encoders utilizan diferentes tipos de tecnologías para convertir el movimiento en una señal eléctrica, estos pueden ser mecánicos, magnéticos, resistivo u ópticos, siendo estos últimos los más comunes.
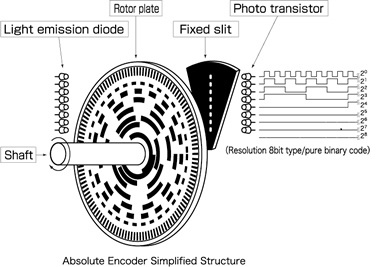
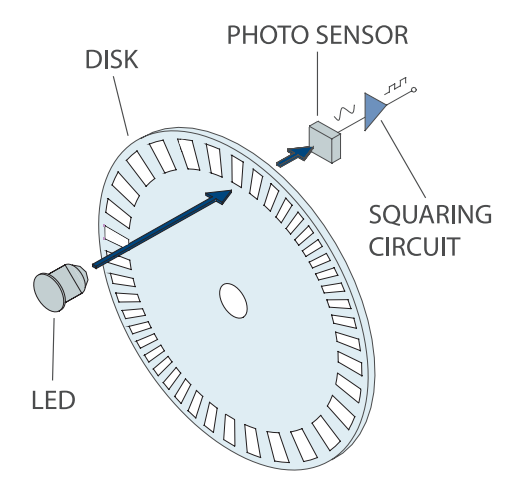
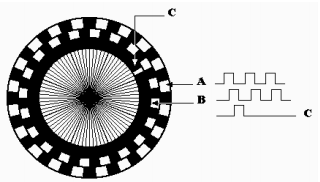
En este tipo de encoders, utilizan un haz emitida por un LED que pasa a través de un disco de código, antes de ser detectada por un fotodiodo, con esto el encoder puede "contar" los grados y saber, el numero de vueltas, la velocidad o la posición.
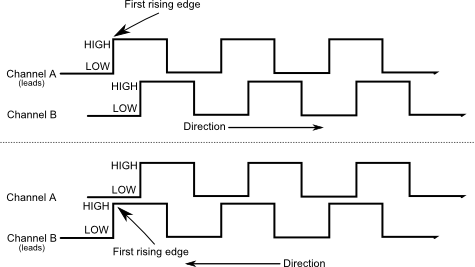
Para saber el sentido de el giro, los encoders utilizan una segunda línea ranurada desfasada 90°, dependiendo del sentido de giro, primero se activa el canal A o el canal B como se puede observar en las siguientes imágenes. Algunos modelos utilizan también una tercer línea con una sola abertura, la cual indica cuando se completa una vuelta, a esta salida se llama index o Z.
Los encoders pueden producir señales ya sea incrementales o absolutas. Las señales incrementales no indican la posición específica, sólo que la posición ha cambiado. Los Encoders absolutos, por otra parte, utilizan una "palabra" diferente para cada posición, lo que significa que un encoder absoluto proporciona tanto una señal que indica que la posición ha cambiado y una señal de la posición absoluta del encoder.